-
1 material
1. материал; вещество; 2. ткань @materials for giving weight and body утяжелители; привесные вещества @materials in process 1. незавершённое производство; 2. полуфабрикаты в переходах производства @adhesive material 1. клейкое вещество; 2. связующее вещество @amorphous material аморфная фаза (ориентированного волокна) @basic material сырьё @blueing materials подцветки (для пряжи или ткани) @coating material смола для покрытия ткани @composition material 1. пластмасса; 2. состав из нескольких компонентов @crystalline material кристаллическая фаза (ориентированного волокна) @fibrous material 1. волокнистое вещество; волокнистый материал; 2. текстильное сырьё @filling materials 1. наполнители; 2. утяжелители; привесные вещества @film-forming materials плёнкообразователи @finishing materials аппретурно-отделочные средства @indirect materials вспомогательные материалы @insulating material изоляционный материал @laminated material 1. двухслойный или многослойный проклеенный материал; 2. дублированная ткань; 3. пластифицированная ткань @lining material 1. подкладочный материал, подкладка; 2. портновский приклад @long-fibred raw material длинноволокнистое сырьё @loose fibrous material 1. волокно в массе; 2. разрыхлённое волокно @mi-synthetic materials полусинтетические волокнообразующие материалы (из природных полимеров) @over-bleached material переотбеленный материал @packing materials тарные или паковочные материалы @plush dress material одёжный плюш @preparatory material грунтовая ткань @scrap material 1. обрезки; лоскут; 2. отходы; 3. демонтированное оборудование @second-hand materials вторичное сырье @shower-proof material водонепроницаемый или водоотталкивающий материал @sizing material 1. шлихта; 2. аппретурный состав @stiff material жёсткий материал @stuffing material набивочный материал @swagger coat material нарядный пальтовый материал @synthetic materials синтетические материалы @textile raw material текстильное сырьё @upholstery-and-drapery material обивочная ткань; мебельная ткань @ -
2 material
1. материал; вещество; 2. ткань @materials for giving weight and body утяжелители; привесные вещества @materials in process 1. незавершённое производство; 2. полуфабрикаты в переходах производства @adhesive material 1. клейкое вещество; 2. связующее вещество @amorphous material аморфная фаза (ориентированного волокна) @basic material сырьё @blueing materials подцветки (для пряжи или ткани) @coating material смола для покрытия ткани @composition material 1. пластмасса; 2. состав из нескольких компонентов @crystalline material кристаллическая фаза (ориентированного волокна) @fibrous material 1. волокнистое вещество; волокнистый материал; 2. текстильное сырьё @filling materials 1. наполнители; 2. утяжелители; привесные вещества @film-forming materials плёнкообразователи @finishing materials аппретурно-отделочные средства @indirect materials вспомогательные материалы @insulating material изоляционный материал @laminated material 1. двухслойный или многослойный проклеенный материал; 2. дублированная ткань; 3. пластифицированная ткань @lining material 1. подкладочный материал, подкладка; 2. портновский приклад @long-fibred raw material длинноволокнистое сырьё @loose fibrous material 1. волокно в массе; 2. разрыхлённое волокно @mi-synthetic materials полусинтетические волокнообразующие материалы (из природных полимеров) @over-bleached material переотбеленный материал @packing materials тарные или паковочные материалы @plush dress material одёжный плюш @preparatory material грунтовая ткань @scrap material 1. обрезки; лоскут; 2. отходы; 3. демонтированное оборудование @second-hand materials вторичное сырье @shower-proof material водонепроницаемый или водоотталкивающий материал @sizing material 1. шлихта; 2. аппретурный состав @stiff material жёсткий материал @stuffing material набивочный материал @swagger coat material нарядный пальтовый материал @synthetic materials синтетические материалы @textile raw material текстильное сырьё @upholstery-and-drapery material обивочная ткань; мебельная ткань @ -
3 composition material
1) Железнодорожный термин: пластмасса2) Текстиль: состав из нескольких компонентов3) Специальный термин: композит4) Автоматика: композиционный материал -
4 eutectic
эвтектика
Расплав (и состав), представляющий собой смесь двух или нескольких компонентов и кристаллизующийся при самой низкой температуре из всех возможных для смесей этих веществ путём одновременного выделения компонентов. Температура плавления эвтектической смеси всегда ниже температуры плавления каждого компонента в отдельности.
[ Словарь геологических терминов и понятий. Томский Государственный Университет]Тематики
- геология, геофизика
Обобщающие термины
EN
Англо-русский словарь нормативно-технической терминологии > eutectic
-
5 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
6 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
7 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
8 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
9 supply
- электроснабжение
- предложение
- поставки
- подводить электропитание
- подача
- источник электропитания радиоэлектронной аппаратуры
- источник питания (в электроснабжении)
- источник (электро)питания
- блок питания
блок питания
устройство питания
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
блок питания
блок электропитания
источник питания
источник электропитания
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
Синонимы
EN
источник (электро)питания
Устройство, преобразующее различные виды энергии (химической, тепловой, электромагнитной) в электрическую. См. UPS.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
источник питания
Характеристики внешних источников питания следует принимать по техническим условиям на присоединение, выдаваемым энегоснабжающей организацией в соответствии с Правилами пользования электрической энергией...
источник питания электроэнергией
-
[Интент]
источник электропитания
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
Основными источниками питания должны служить электростанции и сети районных энергосистем. Исключение представляют большие предприятия с большим теплопотреблением, где основным источником питания может быть собственная электростанция (ТЭЦ). Но и в этом случае обязательно должна предусматриваться связь системы электроснабжения предприятия с сетью энергосистемы.
[СН 174-75 Инструкция по проектированию электроснабжения промышленных предприятий]
1.1.2 Зануление следует выполнять электрическим соединением металлических частей электроустановок с заземленной точкой источника питания электроэнергией при помощи нулевого защитного проводника.
[ ГОСТ 12.1.030-81]
Параллельные тексты EN-RUIt is recommended that, where practicable, the electrical equipment of a machine is connected to a single incoming supply. Where another supply is necessary for certain parts of the equipment (for example, electronic equipment that operates at a different voltage), that supply should be derived, as far as is practicable, from devices (for example, transformers, converters) forming part of the electrical equipment of the machine.
[IEC 60204-1-2006]Рекомендуется, там где это возможно, чтобы электрооборудование машины получало электропитание от одного источника. Если для каких-либо частей электрооборудования машины (например для электронного оборудования, работающего на другом напряжении) необходим отдельный источник питания, то, насколько это возможно, он должен являться частью (такой, например, как трансформатор, конвертор) электрооборудования этой же машины.
[Перевод Интент]
Power supplies
The required power supplies can be determined based on the criteria for definition of the installation (receivers, power, location, etc.) and the operating conditions (safety, evacuation of the public, continuity, etc.).
They are as follows:
- Main power supply
- Replacement power supply
- Power supply for safety services
- Auxiliary power supply
[Legrand]Источники электропитания
Источники электропитания определяют по различным критериям, в соответствии с характеристиками конкретной электроустановки. Определяют типы электроприемников, их мощность, территориальное расположение и др. При этом учитывают условия эксплуатации (безопасность, требования к аварийной эвакуации людей, непрерывность технологического процесса и т. д.).
Применяют следующие источники:
- основной источник питания;
- резервный источник питания;
- аварийный источник питания систем безопасности;
- дополнительный источник питания.
[Перевод Интент]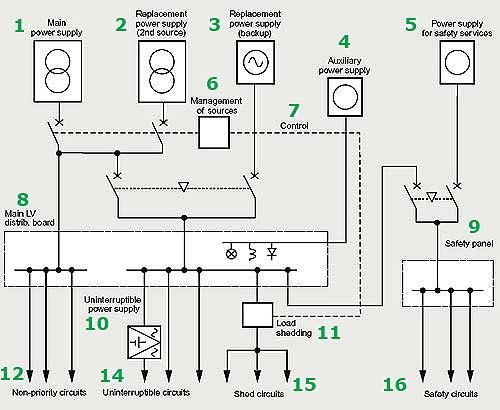
Рис. Legrand
Типовая схема электроснабжения: 1 - Main power supply - Основной источник питания
2 - Replacement power supply (2nd source) - Резервный источник питания (2-й источник)
3 - Replacement power supply (backup) - Резервный источник питания (независимый)
4 - Auxiliary power supply - Дополнительный источник питания
5 - Power supply for safety services - Аварийный источник питания для систем безопасности
6 - Management of sources - Управление источниками питания
7 - Control - Цепь управления
8 - Main LV distrib. board - Главный распределительный щит (ГРЩ)
9 - Safety panel - Панель безопасности
10 - Uninterruptible power supply - Источник бесперебойного питания
11 - Load shedding - Отключение нагрузки
12 - Non-priority circuits - Цепи неприоритетной нагрузки
14 - Uninterruptible circuits - Цепи бесперебойного питания
15 - Shed circuits - Цепи отключаемой нагрузки
16 - Safety circuits - Цепи систем безопасностиТематики
Близкие понятия
Действия
Синонимы
Сопутствующие термины
- аварийный источник питания
- взаимно резервируемые источники питания
- внешний источник питания
- дополнительный источник питания
- источник бесперебойного питания
- источник питания с ограничением тока
- независимый источник питания
- основной источник питания
- резервный источник питания
EN
источник электропитания радиоэлектронной аппаратуры
источник электропитания РЭА
Нерекомендуемый термин - источник питания
Устройство силовой электроники, входящее в состав радиоэлектронной аппаратуры и преобразующее входную электроэнергию для согласования ее параметров с входными параметрами составных частей радиоэлектронной аппаратуры.
[< size="2"> ГОСТ Р 52907-2008]
источник питания
Часть устройства, обеспечивающая электропитание остальных модулей устройства.
[ http://www.lexikon.ru/dict/net/index.html]EN
power supply
An electronic module that converts power from some power source to a form which is needed by the equipment to which power is being supplied.
[Comprehensive dictionary of electrical engineering / editor-in-chief Phillip A. Laplante.-- 2nd ed.]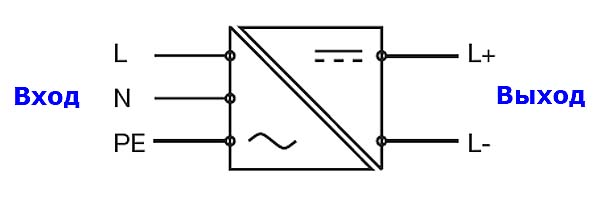
Рис. ABB
Структурная схема источника электропитанияThe input side and the output side are electrically isolated against each other
Вход и выход гальванически развязаны
Терминология относящая к входу
Primary side
Первичная сторона
Input voltage
Входное напряжение
Primary grounding
Current consumption
Потребляемый ток
Inrush current
Пусковой ток
Input fuse
Предохранитель входной цепи
Frequency
Частота
Power failure buffering
Power factor correction (PFC)
Коррекция коэффициента мощности
Терминология относящая к выходу
Secondary side
Вторичная сторона
Output voltage
Выходное напряжение
Secondary grounding
Short-circuit current
То короткого замыкания
Residual ripple
Output characteristics
Выходные характеристики
Output current
Выходной ток
Различают первичные и вторичные источники питания.
К первичным относят преобразователи различных видов энергии в электрическую, например:
- аккумулятор (преобразует химическую энергию.
Вторичные источники не генерируют электроэнергию, а служат лишь для её преобразования с целью обеспечения требуемых параметров (напряжения, тока, пульсаций напряжения и т. п.)Задачи вторичного источника питания
- Обеспечение передачи мощности — источник питания должен обеспечивать передачу заданной мощности с наименьшими потерями и соблюдением заданных характеристик на выходе без вреда для себя. Обычно мощность источника питания берут с некоторым запасом.
- Преобразование формы напряжения — преобразование переменного напряжения в постоянное, и наоборот, а также преобразование частоты, формирование импульсов напряжения и т. д. Чаще всего необходимо преобразование переменного напряжения промышленной частоты в постоянное.
- Преобразование величины напряжения — как повышение, так и понижение. Нередко необходим набор из нескольких напряжений различной величины для питания различных цепей.
- Стабилизация — напряжение, ток и другие параметры на выходе источника питания должны лежать в определённых пределах, в зависимости от его назначения при влиянии большого количества дестабилизирующих факторов: изменения напряжения на входе, тока нагрузки и т. д. Чаще всего необходима стабилизация напряжения на нагрузке, однако иногда (например для зарядки аккумуляторов) необходима стабилизация тока.
- Защита — напряжение или ток нагрузки в случае неисправности (например, короткого замыкания) каких-либо цепей может превысить допустимые пределы и вывести электроприбор или сам источник питания из строя. Также во многих случаях требуется защита от прохождения тока по неправильному пути: например прохождения тока через землю при прикосновении человека или постороннего предмета к токоведущим частям.
- Гальваническая развязка цепей — одна из мер защиты от протекания тока по неверному пути.
- Регулировка — в процессе эксплуатации может потребоваться изменение каких-либо параметров для обеспечения правильной работы электроприбора.
- Управление — может включать регулировку, включение/отключение каких-либо цепей или источника питания в целом. Может быть как непосредственным (с помощью органов управления на корпусе устройства), так и дистанционным, а также программным (обеспечение включения/выключения, регулировка в заданное время или с наступлением каких-либо событий).
- Контроль — отображение параметров на входе и на выходе источника питания, включения/выключения цепей, срабатывания защит. Также может быть непосредственным или дистанционным.
Трансформаторный (сетевой) источник питания
Чаще всего состоит из следующих частей:- Сетевого трансформатора, преобразующего величину напряжения, а также осуществляющего гальваническую развязку;
- Выпрямителя, преобразующего переменное напряжение в пульсирующее;
- Фильтра для снижения уровня пульсаций;
- Стабилизатора напряжения для приведения выходного напряжения в соответствие с номиналом, также выполняющего функцию сглаживания пульсаций за счёт их «срезания».
В сетевых источниках питания применяются чаще всего линейные стабилизаторы напряжения, а в некоторых случаях и вовсе отказываются от стабилизации.
Достоинства такой схемы:- Простота построения и обслуживания
- Надёжность
- Низкий уровень радиопомех.
Недостатки:
- Большой вес и габариты, особенно при большой мощности: по большей части за счёт габаритов трансформатора и сглаживающего фильтра
- Металлоёмкость
- Применение линейных стабилизаторов напряжения вводит компромисс между стабильностью выходного напряжения и КПД: чем больше диапазон изменения напряжения, тем больше потери мощности.
- При отсутствии стабилизатора на выход источника питания проникают пульсации с частотой 100Гц.
В целом ничто не мешает применить в трансформаторном источнике питания импульсный стабилизатор напряжения, однако большее распространение получила схема с полностью импульсным преобразованием напряжения.
Импульсный источник питания
Широко распространённая схема импульсного источника питания состоит из следующих частей:- Входного фильтра, призванного предотвращать распространение импульсных помех в питающей сети
- Входного выпрямителя, преобразующего переменное напряжение в пульсирующее
- Фильтра, сглаживающего пульсации выпрямленного напряжения
- Прерывателя (обычно мощного транзистора, работающего в ключевом режиме)
- Цепей управления прерывателем (генератора импульсов, широтно-импульсного модулятора)
- Импульсного трансформатора, который служит накопителем энергии импульсного преобразователя, формирования нескольких номиналов напряжения, а также для гальванической развязки цепей (входных от выходных, а также, при необходимости, выходных друг от друга)
- Выходного выпрямителя
- Выходных фильтров, сглаживающих высокочастотные пульсации и импульсные помехи.
Достоинства такого блока питания:
- Можно достичь высокого коэффициента стабилизации
- Высокий КПД. Основные потери приходятся на переходные процессы, которые длятся значительно меньшее время, чем устойчивое состояние.
- Малые габариты и масса, обусловленные как меньшим выделением тепла на регулирующем элементе, так и меньшими габаритами трансформатора, благодаря тому, что последний работает на более высокой частоте.
- Меньшая металлоёмкость, благодаря чему мощные импульсные источники питания стоят дешевле трансформаторных, несмотря на бо́льшую сложность
- Возможность включения в сети широкого диапазона напряжений и частот, или даже постоянного тока. Благодаря этому возможна унификация техники, производимой для различных стран мира, а значит и её удешевление при массовом производстве.
Однако имеют такие источники питания и недостатки, ограничивающие их применение:
- Импульсные помехи. В связи с этим часто недопустимо применение импульсных источников питания для некоторых видов аппаратуры.
- Невысокий cosφ, что требует включения компенсаторов коэффициента мощности.
- Работа большей части схемы без гальванической развязки, что затрудняет обслуживание и ремонт.
- Во многих импульсных источниках питания входной фильтр помех часто соединён с корпусом, а значит такие устройства требуют заземления.
[Википедия]
Недопустимые, нерекомендуемые
Тематики
Обобщающие термины
Синонимы
EN
подача
1. Порция одноврем. загружаемых в шахтную печь рудных материалов, флюсов и тв. топлива с определ. соотношением компонентов.
2. Операция перемещения заготовки в одном из направлений (продольном, поперечном, или др.) в промежутках между единичными обжатиями при ковке. В количественном отношении подача — величина перемещения заготовки (абсолютная подача) или отношение поперечного размера заготовки к ее высотному размеру в зоне обжатия (между бойками) — относительная подача.
3. Длина кольцевого участка гильзы или заготовки, обжимаемого и раскатываемого за цикл пилигримовой прокатки труб.
4. Относительное перемещение режущего инструмента и обрабатываемой на станке заготовки. Различают подачу непрерывную (например, на токарных, сверлильных, фрезерных станках) и прерывную или периодическую подачу (например, на строгальных, долбежных станках).
[ http://www.manual-steel.ru/eng-a.html]Тематики
EN
подводить электропитание
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
поставки
1. Означают продажу, включая перепродажу электроэнергии потребителям (Директива 2003/54/ЕС).
2. Продажа электроэнергии, как правило, включает снятие показаний счетчиков и выписывание счетов, в отличие от другой деятельности, такой как генерация, передача, эксплуатация системы и распределение.
[Англо-русский глосcарий энергетических терминов ERRA]EN
supply
1. Means the sale, including resale, of electricity to customers (Directive 2003/54/EC).
2. The sale of electricity, usually including metering and billing, in contrast to other activities such as generation, transmission, system operation and distribution.
[Англо-русский глосcарий энергетических терминов ERRA]Тематики
EN
предложение
Совокупность слов, образующих текстовую единицу, выражающую законченную мысль. Обычно начинается с заглавной буквы и заканчивается знаком препинания, таким как точка, вопросительный или восклицательный знак.
[ http://www.morepc.ru/dict/]
предложение
Одно из основных понятий экономики рынка. Можно определить П. блага (товара) как количество этого блага, которое может быть представлено для продажи на рынке по данной цене. Соответственно, совокупное П. на рынке — общее количество благ, которые могут быть представлены для продажи при данной структуре цен. В нормальных условиях, когда загрузка производственных мощностей близка к полной, выпуск каждой дополнительной единицы продукции требует дополнительных затрат. Чтобы побудить к этому производителя, надо предложить ему повышенную цену (См. Кривая предложения). С другой стороны, потребитель заинтересован в возможно более низкой цене (см. Кривая спроса). Взаимодействие этих интересов и формирует рыночный механизм.
[ http://slovar-lopatnikov.ru/]Тематики
EN
электроснабжение
Обеспечение потребителей электрической энергией.
[ ГОСТ 19431-84]Качество электрической энергии (КЭ) тесно связано с надежностью электроснабжения, поскольку нормальным режимом электроснабжения потребителей является такой режим, при котором потребители получают электроэнергию бесперебойно, в количестве, заранее согласованном с энергоснабжающей организацией, и нормированного качества.
[В. В. Суднова. Качество электрической энергии]Тематики
Действия
Сопутствующие термины
- бесперебойность электроснабжения
- надежность электроснабжения
- нарушение электроснабжения
- нормальный режим электроснабжения
- проект электроснабжения
- электроснабжение от автономного источника питания электроэнергией
EN
Англо-русский словарь нормативно-технической терминологии > supply
10 Pennsylvania
Официальное название - Содружество Пенсильвания [Commonwealth of Pennsylvania]. Штат на северо-востоке США, в группе Среднеатлантических штатов [ Middle Atlantic States]. На севере граничит со штатом Нью-Йорк [ New York], на северо-западе имеет выход к озеру Эри [ Erie, Lake], на востоке граничит со штатом Нью-Джерси [ New Jersey], на юге - со штатами Делавэр [ Delaware] и Мэриленд [ Maryland], на юге и западе с Западной Вирджинией [ West Virginia], на западе - с Огайо [ Ohio]. Южная граница проходит по т.н. линии Мэйсона-Диксона [ Mason-Dixon Line]. Площадь 117,3 тыс. кв. км. Население 12,2 млн. человек (2000) (шестое место среди штатов). Столица Гаррисберг [ Harrisburg]. Крупнейшие города: Филадельфия [ Philadelphia], Питсбург [ Pittsburgh], Эри [ Erie], Аллентаун [ Allentown]. В рельефе присутствуют практически все черты, характерные для востока страны. Большая часть Пенсильвании расположена в районе Аппалачских гор [ Appalachian Mountains] (высшая точка гора Маунт-Дэвис [ Davis, Mount], 980 м), состоящих из нескольких хребтов, разделенных продольными долинами. На западе они переходят в Аппалачское плато [ Appalachian Plateau], на крайнем юго-востоке штата расположена узкая полоса Приатлантической низменности [Atlantic Coastal Plain] вдоль р. Делавэр [ Delaware River]. Юго-восточную часть штата занимает холмистое плато Пидмонт [ Piedmont Plateau], западнее - Голубые горы [ Blue Mountains] и Линия водопадов [ Fall Line]. Реки многоводные, преимущественно быстрые, порожистые, особенно на плато Пидмонт. Наиболее крупные из них судоходны: Саскуэханна [ Susquehanna River], Огайо [ Ohio River] с ее истоками Аллегейни [ Allegheny River] и Мононгахила [ Monongahela River]. Много озер. Более 60 процентов территории покрыто лесами. Штат обладает крупными запасами угля, является крупнейшим производителем антрацита. На северо-западе есть запасы нефти и природного газа. На основной части территории штата континентальный влажный климат. На юго-востоке долгое, жаркое лето, мягкая зима; на Аппалачском плато более долгая зима и короткое лето. До появления поселенцев на территории будущего штата жили племена делаваров [ Delaware], шауни [ Shawnee] и саскуэханна [Susquehanna], племена из Ирокезской лиги [ Iroquois League] и др. В XVII в. о своих правах на эти земли заявляли Голландия, Швеция, Англия. В 1614 голландцы исследовали долину р. Делавэр. В 1643 шведы создали первые постоянные поселения на о. Тиникум [Tinicum Island] и Новый Готтенбург [New Gottenburg] в окрестностях современного г. Честера [ Chester]. В 1655 Новая Швеция [ New Sweden] была завоевана голландцами во главе с П. Стайвесантом [ Stuyvesant, Peter] и вошла в состав Новых Нидерландов [ New Netherland], но в 1664 англичане, в свою очередь, взяли под контроль эту голландскую колонию. В 1681 квакер [ Quakers] У. Пенн [ Penn, William, Jr.] получил в дар от английского короля Карла II территорию, известную под названием "Пенсильванское провидение" [Providence of Pennsylvania]. Колония была названа Пенсильванией в честь отца У. Пенна, адмирала Уильяма Пенна. Первое английское поселение Филадельфия было основано здесь в 1682, вскоре она стала столицей колонии и одним из крупнейших городов в Новом Свете. Пенн-младший задумал создать образцовое общество, основанное на демократических принципах, и назвал его "Священный эксперимент" [ Holy Experiment]. По "Великому закону Пенсильвании" ["The Great Law of Pennsylvania"] - конституции, было создано представительное собрание, провозглашались право каждого на жизнь и свободу и полная веротерпимость; смертная казнь предусматривалась только за убийство и предательство, был введен суд присяжных, участие в выборах ограничивалось незначительным имущественным цензом. Пенн и его последователи заключили соглашения о дружбе с индейцами, что обеспечило достаточно длительный (около 70 лет) период стабильных отношений между поселенцами и местными племенами. В Пенсильванию, кроме квакеров, стали переселяться французские протестанты, шотландцы, немцы [ Pennsylvania Dutch]. К 1750 из-за интенсивного заселения земель начались конфликты с индейцами, со временем приведшие к их вытеснению или уничтожению. Поток английских переселенцев и торговцев в западную Пенсильванию хлынул в середине XVIII в. Французы построили цепь фортов от оз. Эри до устья р. Огайо. В 1754-63 Пенсильвания стала ареной войн с французами и индейцами [ French and Indian wars]. После взятия французского форта Дюкен [ Fort Duquesne] (1758) в 1759-61 на месте современного г. Питсбурга под руководством генерала Дж. Форбса [ Forbes, John] был построен форт Питт [ Fort Pitt], ставший важным форпостом повстанцев в период Войны за независимость [ Revolutionary War]. В 1763 произошло крупное восстание индейцев под предводительством Понтиака [ Pontiac's Conspiracy]. Пенсильвания сыграла существенную роль в борьбе за независимость. Пенсильванцы участвовали во многих битвах в других колониях, в том числе в осаде Бостона (1775), создали собственный флот. На территории будущего штата произошли битвы за форт Миффлин [Fort Mifflin, Battle of], Джермантаун [ Germantown, Battle of] и сражение на ручье Брэндивайн [ Brandywine, Battle of the]. В 1777-78 Дж. Вашингтон [ Washington, George] зимовал со своей армией в Вэлли-Фордж [ Valley Forge] в 40 км западнее Филадельфии. Сам город был центром политической активности в колониях. В июле 1774 здесь проходили выборы делегатов на первый Континентальный конгресс [First Continental Congress; Continental Congresses], который также был проведен в Филадельфии. В 1776 на втором Континентальном конгрессе [Second Continental Congress] была подписана Декларация независимости [ Declaration of Independence]. В 1787 делегаты Конституционного конвента [ Constitutional Convention] в Филадельфии составили проект Конституции США [ Constitution, U.S.]. 12 декабря 1787 Пенсильвания стала вторым по счету штатом США. В 1790-1800 Филадельфия была столицей молодого государства. В 1794 и 1799 штат стал местом первых фермерских восстаний [ Whiskey Rebellion; Fries Rebellion]. Современные границы Пенсильвании возникли в 1792, когда в ее состав была включена территория на северо-западе, известная как "Треугольник Эри" ["Erie Triangle"], что расширило ее выход к побережью этого озера. В 1799 столицей штата стал г. Ланкастер [ Lancaster], а в 1812 она была перенесена в Гаррисберг. Важную роль Пенсильвания сыграла в Гражданской войне [ Civil War], что определялось многими факторами, в том числе аболиционистскими [ abolition] взглядами квакеров, крупными материальными и людскими ресурсами штата и его географическим положением. Основные дороги с Юга [ South] проходили через Гаррисберг, Филадельфию и Питсбург, поэтому, чтобы получить контроль над ними, армия конфедератов Северной Вирджинии [ Army of Northern Virginia] вторглась в Пенсильванию в 1863. Геттисбергское сражение [ Gettysburg, Battle of] (1863) на территории штата стало одним из самых значительных и кровопролитных за время войны. Около трети участников сражения со стороны Армии Союза [ Union Army] были пенсильванцами. В 1873 была принята ныне действующая конституция штата [ state constitution]. Верховный суд штата - один из старейших в стране (создан в 1722). Штат, жители которого поддерживали демократов в 1800-60, после войны стал одним из оплотов Республиканской партии [ Republican Party]. В 1859 у г. Титусвилла [Titusville] начала действовать одна из первых в мире нефтяных скважин. После войны в штате стала интенсивно развиваться промышленность, особенно сталелитейная. В 1867 был впервые использован бессемеровский процесс производства стали. К 1870 крупнейшим индустриальным центром стал г. Питсбург, где производилось до двух третей всей стали США. К концу XIX в. сложилась крупнейшая сталелитейная империя Э. Карнеги [ Carnegie, Andrew], которая после продажи Дж. П. Моргану [ Morgan, John Pierpont] (1901) стала основой корпорации "Юнайтед Стейтс стил" [ United States Steel Corp.]. В штате создана многоотраслевая экономика, в которой важнейшее место принадлежит промышленному производству, сконцентрированному прежде всего в Филадельфии и Питсбурге. По числу занятых в промышленности штат уступает только Калифорнии и Нью-Йорку. Ведущие отрасли - сталелитейная, черная металлургия, транспортное машиностроение, производство металлоизделий, промышленного оборудования, электронных компонентов, инструментов, приборов, химикатов, стройматериалов, изделий из пластмасс, продуктов питания, одежды; развиты полиграфия и энергетика, в том числе ядерная. Географическое положение и высокоразвитая сеть дорог делают штат "воротами" Среднего Запада [ Midwest] и Юга [ South]. Высоко развито сельское хозяйство: Пенсильвания лидирует в производстве молока и молочных продуктов, бройлеров, яиц, яблок, шампиньонов. Основные посевные культуры - кукуруза, сеяные травы, соя, пшеница. Один из наиболее доходных секторов экономики - туризм. В целом, бурный рост экономического развития прерывался только во время разрушительного Джонстаунского наводнения [ Johnstown flood] в 1899 и в период Великой депрессии [ Great Depression] 1930-х. В годы второй мировой войны штат играл важную роль в военном производстве. Ныне Пенсильвания продолжает оставаться лидером в области сталелитейной промышленности и добычи угля. В конце XIX - начале XX в. в политической жизни штата господствовали республиканские боссы [ bossism]. Конец этой эпохи наступил с кончиной Б. Пенроуза [ Penrose, Boies] в 1921. В последние годы ни одна из основных партий не имеет постоянного превосходства на выборах различного уровня. По мере промышленного роста росло и рабочее движение, создавались профсоюзы. Штат стал местом крупных забастовок железнодорожников - в Питсбурге (1877), сталелитейщиков [ Homestead Steel Strike] (1892), горняков [ Anthracite Strike of 1902] (1902). В Пенсильвании берет начало АФТ-КПП [ AFL-CIO].English-Russian dictionary of regional studies > Pennsylvania
11 Washington
1) см Washington, D.C.2) Штат на северо-западе США, один из штатов Тихоокеанского Северо-Запада [ Pacific Northwest]. Относится к группе Тихоокеанских штатов [ Pacific States]. Площадь 184,6 тыс. кв. км. 5,8 млн. жителей (2000). Столица Олимпия [ Olympia]. Крупные города - Сиэтл [ Seattle], Спокан [ Spokane], Такома [ Tacoma]. На юге граничит со штатом Орегон [ Oregon], на востоке со штатом Айдахо [ Idaho], на севере с канадской провинцией Британская Колумбия. На западе штат омывается Тихим океаном; залив Пьюджет-Саунд [ Puget Sound] на северо-западе отделяет от материка полуостров Олимпик [Olympic Peninsula]. Рельеф и местность отличаются большим разнообразием. В западной части вдоль побережья протянулись с севера на юг Каскадные горы [ Cascade Range] (высшая точка штата гора Рейнир [ Rainier, Mount], 4392 м; другая известная вершина, гора Сент-Хелленс [ St. Helens, Mount], - действующий вулкан, последнее извержение которого произошло в 1980). Восточнее лежит Колумбийское плато [ Columbia Plateau], прорезанное каньонами р. Колумбия [ Columbia River] и ее притоков Снейк [ Snake River], Оканоган [Okanogan River], Якима [ Yakima River] и др. На р. Колумбия расположены крупные электростанции Гранд-Кули [ Grand Coulee Dam] и Бонневил [ Bonneville Dam]. На севере штата возвышенность Оканоган [Okanogan Highlands]. На крайнем востоке отроги Скалистых гор [ Rocky Mountains]. В штате много озер, крупнейшее - Челан [Chelan, Lake] у восточных склонов Каскадных гор. На западе штата мягкий, влажный климат, на востоке более континентальный, с сухим летом и прохладной зимой. Штат обладает богатыми лесными ресурсами, особенно в западной части; среди наиболее распространенных пород - дугласия [ Douglas fir], гемлок [ hemlock], ситкинская ель [ Sitka spruce] и другие хвойные породы. Имеются полезные ископаемые (в том числе запасы угля, золота, серебра, урана), но интенсивная добыча и разработка месторождений не ведется. Установлено, что уже более 10 тыс. лет назад на территории будущего штата жили индейцы. К моменту появления первых европейцев (ими были в 1775-92 испанцы и английские капитаны Дж. Кук и Дж. Ванкувер [ Vancouver, George]) здесь жили племена чинук [ Chinook], нискуолли [ Nisqually], пуяллуп [ Puyallup], спокан [ Spokan], нез-персэ [ Nez Perce], оканоган [ Okanagan] и якима [ Yakima]. Экспедиция Льюиса и Кларка [ Lewis and Clark Expedition] в 1805-06 и приход в эти края торговцев пушниной положили начало освоению региона, которое сопровождалось резким сокращением численности местных племен из-за болезней и эпидемий, потерей земель и переселением в резервации. В первые десятилетия XIX в. здесь активно действовали три пушные фирмы - Американская пушная компания [ American Fur Company], Северо-западная компания [ North West Company] и Компания Гудзонова залива [ Hudson's Bay Company] (с 1821), торговавшие помимо меха древесиной, сушеной рыбой, некоторыми продуктами. В результате деятельности М. Уитмена [ Whitman, Marcus] и других миссионеров в 1830-х приток переселенцев значительно увеличился. Орегонские земли [ Oregon country] стали предметом территориальных споров между США и Великобританией. В начале 1840-х в стране был выдвинут лозунг "54-40 или война" [ Fifty Four Forty or fight], отражавший американские требования, касающиеся северной границы, но по договору с Англией 1846 граница прошла по 49-й параллели, а окончательно была установлена только в 1871 [ Oregon Question]. За убийством Уитмена в 1847 последовали затяжные конфликты с индейцами, еще на десятилетие отодвинувшие освоение района. Тем не менее и в этот период было создано несколько поселений: Олимпия (1846), Сиэтл и Порт-Таунсенд [Port Townsend] (1851), Беллингем [Bellingham] (1852). В марте 1853 Конгресс создал здесь Территорию Колумбия [Columbia Territory], которая вскоре была переименована в Территорию Вашингтон [Washington Territory]. Первому губернатору А. Стивенсу [Stevens, Isaac I.] удалось за несколько лет заключить мирные договоры с индейцами и содействовать быстрой раздаче земель, значительная часть которых была освоена поселенцами к 1860. В течение 30 лет с 1860 по 1890 численность населения увеличилась с 12 тыс. до 357 тыс. В 1889 Территория Вашингтон была принята в состав США в качестве 42-го штата. Штат носит имя первого президента США Дж. Вашингтона [ Washington, George], и его портрет изображен на флаге штата. В XX в. на развитии штата положительно отразился период "Нового курса" [ New Deal] - была создана мощная энергетическая база, появились условия для перемещения в регион промышленных предприятий. В 1940-е в штате были построены заводы компании "Боинг" [ Boeing Company] (ныне - крупнейший работодатель в штате). Вторая мировая война способствовала развитию в штате трудоемких производств военно-промышленного комплекса. В 1943 в Хэнфорде началось строительство первой в стране АЭС. В деревообработке и целлюлозно-бумажной промышленности традиционно ведущую роль продолжают играть крупные компании. Роль сельского хозяйства в целом постепенно снижается. В прибрежных районах развиты рыболовство, судостроение, металлургия, машиностроение, полиграфическая промышленность. С начала 1980-х предпочтение в экономике штата отдается высоким технологиям, прежде всего производству компьютеров, электронных компонентов, программного обеспечения (здесь находится одна из крупнейших фирм мира в этой области - "Майкрософт" [ Microsoft Corporation]). Значительную роль в экономической жизни штата играет торговля со странами Азиатско-Тихоокеанского региона; Сиэтл - один из крупнейших международных морских портов Тихоокеанского побережья. В последние десятилетия штат стал крупным центром туризма, чему способствуют как природные условия, так и развитая сеть национальных парков, лесных заказников, зон отдыха, горнолыжных курортов и т.п.3) Название населенных пунктов в нескольких штатах (в Арканзасе, Иллинойсе, Индиане, Огайо и др.). Наиболее крупный (15,2 тыс. жителей в 2000) находится на юго-западе Пенсильвании.12 mixture
смесь; смешивание mixture of hazards наличие нескольких опасных свойств (вещества, материала) mixture acetylene air - смесь ацетилена с воздухом (для сварки) mixture air-flue gas - смесь воздуха и дымовых газов mixture air-fuel (air-petrol) - топливо-воздушная смесь mixture alkane-air-diluent -s алкано-воздушные смеси mixture anergolic - невоспламеняющаяся (топливная) смесь mixture antifreeze - антифриз mixture azeotropic - азеотропная смесь, азеотроп mixture binary - бинарная (двойная) смесь mixture bipropellant - смесь двух компонентов ракетного топлива mixture chemical - химическая смесь mixture combustible - горючая смесь mixture deflagrating - легковоспламеняющаяся смесь (без взрыва) mixture diergolic - несамовоспламе-няющаяся (топливная) смесь mixture explosive - взрывоопасная (взрывчатая) смесь mixture first fire - имитирующий (воспламеняющий) состав mixture flammable - (легко) воспламеняющаяся смесь mixture foam/water - водный раствор пенообразователя mixture fuel - горючая или топливная смесь mixture fuel-air - топливо-воздушная смесь mixture fuel lean - предельно бедная горючая смесь mixture fuel-rich - богатая (горючая) смесь, смесь с большим содержанием горючего mixture gas - (горючая) газовая смесь mixture gas-air - газовоздушная смесь gas(eous) - (горючая) газовая смесь mixture heterogeneous - гетерогенная смесь mixture homogeneous - гомогенная (однородная) смесь mixture hypergolic - самовоспламеняющаяся смесь mixture igniting (ignition) - воспламенительная (воспламеняющая) смесь mixture inflaniniable - воспламеняющаяся (горючая) смесь mixture intimate - однородная смесь mixture lean - однородная (горючая) смесь mixture liquid-solid - жидкотвердая смесь, шуга mixture maximum speed - смесь, горящая с максимальной скоростью mixture mechanical - механическая смесь mixture nonhypergolic - несамовоспламеняющая смесь mixture oxidant-rich - бедная (горючая смесь, смесь с избытком окислителя) mixture poor - бедная (горючая) смесь mixture quick-burning - быстрогорящая смесь mixture rare - бедная (горючая) смесь mixture rich - богатая (горючая) смесь mixture saturated air - смесь воздуха насыщенными парами горючего mixture self-igniting (self-inflammable) - самовоспламеняющаяся смесь mixture stoichiometric - стехиометрическая смесь mixture uniform - однородная смесь mixture weak - бедная (горючая) смесь13 aggregate
- укрупнять
- механическая смесь
- конструкция
- комплект аппаратуры
- инертный материал (бетона)
- заполнители для бетона
- агрегатный
- агрегат данных
- агрегат (сросток минералов в породе)
- агрегат
агрегат
1. укрупнённый унифицированный узел оборудования и устройств, выполняющий определённые функции
2. совокупность механически соединённых нескольких разнотипных машин или устройств, работающих в комплексе
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
агрегат
Сборочная единица, обладающая полной взаимозаменяемостью, возможностью сборки отдельно от других составных частей изделия или изделия в целом и способностью выполнять определенную функцию в изделии или самостоятельно.
[ ГОСТ 23887-79]Тематики
EN
- 1. assembly
- 1. unit
- 2. multi - union machine
- 2. set
- aggregate
DE
FR
- 1. bloc
- 1. ensemble
- 2. bloc
- 2. groupe
агрегат (сросток минералов в породе)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
агрегат данных
агрегат
Структурированная совокупность элементов данных.
[ ГОСТ 28397-89]
агрегат данных
- Составной элемент данных
- Набор элементов данных внутри записи, имеющий имя, по которому к нему можно обратиться.
[ http://www.morepc.ru/dict/]Тематики
Синонимы
EN
агрегатный
суммарный
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
заполнители для бетона
Химически инертные сыпучие материалы, составляющие основу бетонов
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
инертный материал (бетона)
—
[ http://slovarionline.ru/anglo_russkiy_slovar_neftegazovoy_promyishlennosti/]Тематики
EN
комплект аппаратуры
установка
совокупность
множество
составной
общий
полный
итоговый
совокупный
суммарный
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
конструкция
Устройство, взаимное расположение частей и состав машины, механизма или сооружения.
[ http://sl3d.ru/o-slovare.html]Параллельные тексты EN-RU
The new valve profile is design to ensure smooth and precise control at low capacities for improved part load performances.
[Lennox]Вентиль новой конструкции обеспечивает плавное и точное регулирование при низкой производительности холодильного контура, что увеличивает его эффективность при неполной нагрузке.
[Интент]
Тематики
EN
27. Агрегат данных
Агрегат
Aggregate
Структурированная совокупность элементов данных
Источник: ГОСТ 28397-89: Языки программирования. Термины и определения оригинал документа
3.2 агрегат (aggregate): Частица, состоящая из совокупности частиц, скрепленных сильными связями, или из сплавленных частиц, общая внешняя поверхность которой может быть значительно меньше суммы расчетной поверхности отдельных ее компонентов.
Примечание 1 - Силы, скрепляющие агрегат вместе, - сильные взаимодействия, например ковалентные связи или те, которые образуются в результате спекания или сложной физической запутанности.
Примечание 2 - Агрегаты также называют вторичными частицами, а их исходные составляющие называют первичными частицами.
Источник: ГОСТ Р 54848-2011: Нанопорошки энергонасыщенных материалов. Общие технические требования. Методы испытаний оригинал документа
Англо-русский словарь нормативно-технической терминологии > aggregate
См. также в других словарях:
Состав — 7. Состав и свойства золы и шлака ТЭС / Справочное пособие. Л.: Энергоатомиздат. 1985. Источник: П 78 2000: Рекомендации по контролю за состоянием грунтовых вод в районе размещения золоотвалов ТЭС 1. Состав и свойства золы и шл … Словарь-справочник терминов нормативно-технической документации
Состав продукта — 3.5.5 Состав продукта Перечень ингредиентов приводят для всех пищевых продуктов, за исключением продуктов, состоящих из одного ингредиента. Перед списком ингредиентов должен быть заголовок «Состав». Ингредиенты перечисляют в порядке уменьшения… … Словарь-справочник терминов нормативно-технической документации
Строение и химический состав бактериальной клетки — Общая схема строения бактериальной клетки показана на рисунке 2. Внутренняя организация бактериальной клетки сложна. Каждая систематическая группа микроорганизмов имеет свои специфические особенности строения. Клеточная стенка.… … Биологическая энциклопедия
ГОСТ Р 54612-2011: Вагоны пассажирские локомотивной тяги и моторвагонный подвижной состав. Требования к обмывке и очистке — Терминология ГОСТ Р 54612 2011: Вагоны пассажирские локомотивной тяги и моторвагонный подвижной состав. Требования к обмывке и очистке оригинал документа: 3.1 водородный показатель рН: Показатель щелочности или кислотности, который может служить… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 54893-2012: Вагоны пассажирские локомотивной тяги и моторвагонный подвижной состав. Требования к лакокрасочным покрытиям и противокоррозионной защите — Терминология ГОСТ Р 54893 2012: Вагоны пассажирские локомотивной тяги и моторвагонный подвижной состав. Требования к лакокрасочным покрытиям и противокоррозионной защите оригинал документа: 3.1 безвоздушное распыление: Распыление лакокрасочного… … Словарь-справочник терминов нормативно-технической документации
Противогололедные реагенты: состав, преимущества и недостатки — Ниже приводится информация о противогололедных реагентах. Противогололедные реагенты (ПГР) – твердые (сыпучие) или жидкие (растворы) химические искусственные средства, распределяемые по поверхности дорожного покрытия для борьбы с зимней… … Энциклопедия ньюсмейкеров
50.1.031-2001: Информационные технологии поддержки жизненного цикла продукции. Терминологический словарь. Часть 1. Стадии жизненного цикла продукции — Терминология 50.1.031 2001: Информационные технологии поддержки жизненного цикла продукции. Терминологический словарь. Часть 1. Стадии жизненного цикла продукции: 3.7.12. (всеобщее) управление качеством : Совокупность программных средств и данных … Словарь-справочник терминов нормативно-технической документации
Р 50.1.031-2001: Информационные технологии поддержки жизненного цикла продукции. Терминологический словарь. Часть 1. Стадии жизненного цикла продукции — Терминология Р 50.1.031 2001: Информационные технологии поддержки жизненного цикла продукции. Терминологический словарь. Часть 1. Стадии жизненного цикла продукции: 3.7.12. (всеобщее) управление качеством : Совокупность программных средств и… … Словарь-справочник терминов нормативно-технической документации
Земля — (Earth) Планета Земля Строение Земли, эволюция жизни на Земле, животный и растительный мир, Земля в солнечной системе Содержание Содержание Раздел 1. Общая о планете земля. Раздел 2. Земля как планета. Раздел 3. Строение Земли. Раздел 4.… … Энциклопедия инвестора
Земля (планета) — Земля (от общеславянского зем пол, низ), третья по порядку от Солнца планета Солнечной системы, астрономический знак Å или, ♀. I. Введение З. занимает пятое место по размеру и массе среди больших планет, но из планет т. н. земной группы, в… … Большая советская энциклопедия
Земля — I Земля (от общеславянского зем пол, низ) третья по порядку от Солнца планета Солнечной системы, астрономический знак ⊕ или, ♀. I. Введение З. занимает пятое место по размеру и массе среди больших планет, но из планет т … Большая советская энциклопедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с английского на русский
с русского на английский- С русского на:
- Английский
- С английского на:
- Русский